
Estereoscopia
A estereoscopia ( antigos gregos στερεός aparelhos de som , espaço / espacialmente fixo 'e σκοπέω skopeo considerar') é a reprodução de imagens com uma impressão espacial de profundidade, o que não está fisicamente presente. Coloquialmente, a estereoscopia é incorretamente referida como " 3D ", embora sejam apenas imagens bidimensionais ( 2D ) que transmitem uma impressão espacial ("imagem espacial"). Imagens bidimensionais normais sem impressão de profundidade são chamadas de monoscópicas (grego: μονος, monos “um” → simples).
O princípio sempre se baseia no fato de que os humanos, como todos os primatas e a maioria dos predadores , veem seus arredores através de seus dois olhos de dois ângulos ao mesmo tempo . Isso permite que seu cérebro atribua com eficiência uma distância a todos os objetos que estão sendo visualizados e obtenha uma imagem espacial de seus arredores (“ visão espacial ”) sem ter que manter a cabeça em movimento. A estereoscopia, portanto, está preocupada apenas em trazer diferentes imagens bidimensionais de dois ângulos de visão ligeiramente diferentes para os olhos esquerdo e direito.
Existem vários métodos para fazer isso.
Todas as outras propriedades de uma imagem bidimensional, como distorção de perspectiva dependendo de uma distância focal não natural da lente , a cor e, em particular, a localização restrita do visualizador, são mantidas. São precisamente as duas últimas propriedades deste método de imagem espacial que fazem uma diferença considerável para a holografia , que se preocupa com a tentativa de registrar e reproduzir objetos completamente, ou seja, tridimensionalmente (em 3D).

Fundamentos
Ao olhar para objetos próximos, a visão binocular ( binocular ) é um meio essencial para estimar distâncias corretamente. Com o olho direito, vemos um objeto próximo projetado em uma parte diferente do fundo do olho do que com o olho esquerdo, e essa diferença se torna mais significativa quanto mais perto o objeto se move (ver disparidade lateral ). Se direcionarmos ambos os olhos para um ponto, os dois eixos dos olhos formam um ângulo que se torna maior quanto mais próximo o objeto estiver. Objetos próximos são vistos um pouco mais de um lado com o olho direito e um pouco mais do outro com o olho esquerdo. Essas duas imagens, que podem não coincidir exatamente devido ao deslocamento lateralmente disparatado , mas, no entanto, situam-se na chamada área de Panum , são combinadas para formar uma impressão espacial geral (imagem espacial), que é, portanto, essencialmente composta por duas peças de informação : A perspectiva diferente Ambos os olhos produzem duas imagens diferentes e a curvatura da lente adapta-se à distância do objeto visto para produzir uma imagem nítida na retina . O tamanho do ângulo de visão e o grau de acomodação fornecem uma medida da distância dos objetos. A resolução espacial é, portanto, particularmente alta na área de alcance. Além disso, os efeitos de ocultação e desfoque, bem como a perspectiva, transmitem a impressão espacial tanto binocular quanto monocular.
Na foto estéreo, apenas a informação formada a partir dos diferentes ângulos é oferecida aos olhos. Como o olho tenta adaptar o poder de refração do cristalino à suposta distância, uma imagem nítida na retina só surge após um certo atraso (na faixa dos milissegundos). A contradição entre a suposta distância do objeto visto e a curvatura real da lente também causa tontura ou desconforto físico em algumas pessoas após exposição prolongada (descompasso entre vergência e curvatura da lente ).
O resultado de uma imagem de aparência irreal ocorre quando a foto estéreo é apresentada de forma nítida em todos os planos, a fim de obter a impressão espacial em profundidade total. Na natureza, entretanto, apenas uma determinada área pode ser vista em foco ( profundidade de campo do olho). Para não sobrecarregar o sentido da visão, a área gerenciável pode ser deliberadamente limitada durante a gravação (veja abaixo: Lüscher-Winkel ).
As duas imagens parciais necessárias são gravadas simultaneamente (de forma síncrona) com uma câmera estéreo que possui duas lentes à distância dos olhos, também chamada de base natural . Cada imagem individual é referida como uma imagem estereoscópica parcial , o par de imagens como uma imagem estereoscópica . No entanto, se o assunto desejado ainda são motivos ( natureza morta , paisagem ), as imagens parciais necessárias também podem ser gravadas uma após a outra (metacronicamente) com uma câmera simples.
Uma ampliação ou redução da base ao tirar a foto aumenta ou reduz a impressão espacial quando vista. Mas mesmo ao gravar com uma base natural, você deve levar em consideração os diferentes limites do desvio máximo tolerável (desvio). É um mérito de Luscher tê-los apontado.
história
Já no século 4 aC, o matemático grego Euclides lidou com geometria espacial ( estereometria ) nos volumes 11-13 de seus livros de matemática . Mas ele não sabia que dois olhos são necessários para uma impressão visual fisiologicamente espacial.
Em 1838, Sir Charles Wheatstone (1802–1875) publicou sua primeira pesquisa sobre visão espacial. Ele calculou e desenhou pares de imagens estéreo e construiu um dispositivo para visualizá-las, no qual o olhar do observador era desviado para as imagens parciais por espelhos. Ele chamou esse dispositivo de estereoscópio. Wheatstone conseguiu a união das duas imagens parciais por meio de seu estereoscópio de espelho, que consiste em dois espelhos inclinados em ângulos retos entre si , cujos planos são verticais. O observador olhou no espelho esquerdo com o olho esquerdo e no espelho direito com o olho direito. Ao lado dos espelhos, duas placas deslizantes foram fixadas, que carregavam os desenhos em perspectiva invertida de um objeto. Os raios que emanam dos pontos correspondentes nos dois desenhos foram refletidos pelos espelhos de tal forma que pareciam vir de um único ponto atrás dos espelhos. Assim, cada olho viu a imagem que lhe pertencia e o observador recebeu a impressão espacial.
Depois que Louis Daguerre anunciou o processo de produção de imagens fotográficas em camadas de prata em 1839 na Academia de Ciências de Paris , fez sentido usá-lo para produzir imagens duplas estereoscópicas, que até então estavam disponíveis apenas na forma desenhada.
Em 1849, Sir David Brewster (1781-1868), físico escocês e estudioso particular, apresentou a primeira câmera de duas lentes com a qual se podia capturar instantâneos em movimento estereoscopicamente pela primeira vez. Até então, as imagens estéreo parciais tinham que ser expostas uma após a outra e a câmera tinha que ser movida entre as duas gravações à distância dos olhos, o que poderia levar a diferentes conteúdos de imagem com assuntos em movimento que não permitiam uma impressão espacial.
No mesmo ano, Brewster simplificou o estereoscópio substituindo os espelhos por prismas lenticulares . Para esses instrumentos, uma lente convergente com uma distância focal de cerca de 180 mm foi cortada em duas peças semicirculares, e as duas metades, com suas bordas circulares voltadas uma para a outra, foram fixadas em uma moldura. Olhando por trás das lentes, foi inserida uma folha de papel contendo os dois desenhos (ou imagens fotográficas).
O efeito de lente possibilitou a visualização das imagens sem que os olhos tivessem que se ajustar à curta distância da imagem ( acomodação ). O efeito prisma tornou possível usar um deslocamento lateral maior do que a distância interpupilar natural (cerca de 65 mm) entre as duas imagens, o que significava que as imagens poderiam ser mais largas. Isso, por sua vez, possibilitou cobrir um ângulo de visão mais amplo e imprimir ou desenhar as imagens com maior resolução .
Estereoscópios deste tipo com uma série de imagens de papel eram de uso comum no século XIX. Normalmente, no entanto, eram usadas duas pequenas lentes, cujos eixos coincidiam aproximadamente com os eixos dos olhos (isto é, sem efeito de cunha de prisma) e pares de imagens de 6 x 6 cm adaptadas à distância do olho.
A partir de agora, hordas de fotógrafos tiraram fotos estereoscópicas em suas excursões por todo o mundo. No Museu Britânico em Londres hoje, gravações em estéreo históricos de escavações e paisagens são mostrados em várias salas, que são montados em um disco redondo. Esta visualização é a precursora dos populares dispositivos View Master da década de 1950.
Em 1851, o oculista francês Jules Duboscq apresentou seus dispositivos ao público na Exposição Mundial de Londres . Os estereoscópios de Brewster foram usados para exibir daguerreótipos estéreo . A resposta do público foi impressionante, e a Rainha Vitória também ficou entusiasmada com a apresentação. O avanço triunfante das imagens estéreo não podia mais ser interrompido.
O estereoscópio foi mais amplamente usado no projeto desenvolvido por Oliver Wendell Holmes em 1861 , um estereoscópio com ajuste de foco que se tornou um padrão de fato.
Por volta de 1880, August Fuhrmann desenvolveu um grande visor estéreo circular, o chamado Kaiserpanorama . Por volta de 1900, tornou-se um meio de comunicação de massa popular na Europa Central.
Wilhelm Gruber inventou o View-Master em 1938, um visualizador estéreo com painéis de imagem intercambiáveis.
Por volta de 1900 e na década de 1950, a fotografia estéreo experimentou um boom. Os estereoscópios domésticos tornaram-se populares. Os editores ofereceram cartões estereoscópicos de todo o mundo. No entanto, devido à maior complexidade técnica, a estereofotografia nunca se estabeleceu no longo prazo. Hoje, graças à introdução da câmera digital , ela está passando por um ligeiro renascimento porque o caro papel fotográfico não é mais necessário e os experimentos são mais baratos.
A partir de 1910, a fotografia estéreo foi cada vez mais substituída pelo novo meio de cinema.
Durante a Primeira Guerra Mundial , aviões de reconhecimento de todas as partes em conflito tiraram inúmeras fotos. Em 1916, eles já operavam em altitudes de mais de 4.000 m devido às defesas antiaéreas cada vez mais fortes. Com câmeras de alta resolução e, posteriormente, também imagens em série, eles forneceram importantes insights sobre o interior do inimigo. Seções inteiras da frente foram fotografadas sistematicamente; No Alto Comando do Exército, foram criados departamentos de fotos de funcionários com laboratórios, reparos e instalações de arquivo. As câmeras da série especial com grandes distâncias focais desenvolvidas pelas empresas Zeiss , Görz, Ernemann e Messter foram instaladas verticalmente suspensas nas máquinas alemãs. Gravações de imagens dimensionadas espacialmente foram criadas usando técnicas de gravação estereoscópica, que topógrafos e cartógrafos converteram em mapas frontais detalhados para as equipes.

No início, estereoscopia “falsa” de duas fotos tiradas uma após a outra em Hanover , reconhecível entre outras coisas. nas diferentes posições da pessoa no canto inferior direito

Duas imagens estereoscópicas parciais em uma imagem para a visualização cruzada

Mapa "Raumbild" de 1949

Álbum "Raumbild" de 1949, na capa do livro estão compartimentos para o Raumbildkarten e os óculos especiais.
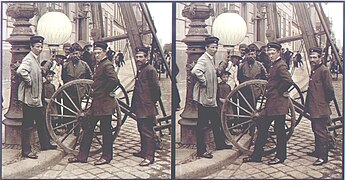
Instalação de uma lâmpada de arco de carbono em Berlim, 1890, foto estereoscópica (foto dupla) com duas câmeras de perspectivas ligeiramente diferentes para criar espacialidade nos panoramas imperiais de August Fuhrmann

Um estereoscópio no antigo cinema Prater de Viena "Kaiserpanorama" por volta de 1900

Estereoscópio por volta de 1915

Quartéis dos soldados na Primeira Guerra Mundial perto de Mouron

A Catedral de Milão ; Foto de G. Brogi, cerca de 1870
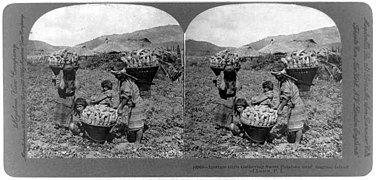
Fotografia estéreo, ca.1906
 A mesma foto montada como uma imagem anáglifo
A mesma foto montada como uma imagem anáglifo


A Casa Alemã como uma réplica do Palácio de Charlottenburg na Exposição Mundial em St. Louis como estereoscopia, 1904








_-_Cattedrale_di_Milano_da_Palazzo_Reale,_ca._1870.jpg)



admissão

Ao gravar uma estereografia com uma câmera estéreo real com duas lentes ou uma câmera de campo de luz, você pode tirar fotos normalmente. Ao projetar o motivo, deve-se prestar atenção ao primeiro plano e ao plano de fundo alternados dos objetos. Isso promove o efeito de profundidade espacial ao olhar para a foto posteriormente.
As gravações de paisagens estéreo sem primeiro plano raramente aparecem tridimensionais se gravadas com uma base estéreo normal (relevo ocular). Portanto, se você quiser espaço excessivo, uma base estéreo expandida é criada. Por exemplo, duas gravações são feitas uma após a outra com uma câmera convencional, a câmera sendo deslocada horizontalmente por cerca de 50 centímetros entre as gravações, convenientemente em um slide. Uma desvantagem deste método é que a seção do objeto (o motivo) pode ter mudado nesse meio tempo, por exemplo, o vôo dos pássaros. Essa mudança às vezes interrompe uma fusão espacial. Portanto, é aconselhável fazer gravações com uma base estéreo mais ampla com duas câmeras fixas que são disparadas simultaneamente usando os meios adequados, por exemplo, usando um disparador de cabo.
Uma técnica de gravação simples para leigos estéreo com câmeras de visor: primeira foto-objeto com peso corporal na perna esquerda, segunda foto-objeto com peso corporal na perna direita. A base estéreo afeta o desvio entre as duas fotos.
Regras básicas de gravação estereoscópica
(baseado em)
O objetivo de uma boa gravação estéreo é geralmente uma reprodução do que foi visto da forma mais realista possível. Manter a mesma posição dos feixes de raios durante a gravação e visualização é a condição básica para uma reprodução geometricamente real (tautomórfica). Caso contrário, o efeito estéreo não estará disponível devido a demandas excessivas ou ocorrerá uma distorção espacial do original (imagens espaciais heteromórficas).
- Os pares de imagens parciais devem ter as mesmas diferenças nos ângulos de visão (paralaxes) que na visão livre, por isso a base deve corresponder à distância interpupilar média de 65 mm.
- Ao visualizar, os mesmos ângulos de visualização de quando se tira a foto devem ser mantidos. Por outro lado, as imagens parciais devem ser vistas a uma distância dos olhos igual à distância focal da gravação e devem estar localizadas em um plano. Por outro lado, a distância entre os centros da imagem ou os pontos distantes correspondentes da imagem deve ser de 65 mm.
- Os eixos da imagem das duas imagens parciais devem seguir a mesma direção ao visualizar e ao tirar a foto. Este requisito significa que para a visualização não apenas, como já exigido em (2), as imagens parciais devem ser montadas a uma distância das lentes de gravação, mas também devem ser inseridas no visualizador, por exemplo, um estereoscópio de lente, de modo que a lente os eixos encontram os centros da imagem. Se os centros da lente são deslocados lateralmente em relação aos centros parciais da imagem, a impressão espacial que surge aparece deslocada lateralmente e distorcida, quanto maior for o desvio da posição normal, maior será.
- Da mesma forma, se os centros da imagem e da lente não forem iguais em altura, também ocorre distorção. Desde que a distorção da altura permaneça dentro de limites moderados e, acima de tudo, seja a mesma em ambas as imagens parciais, dificilmente será um problema. Por outro lado, uma diferença de altura entre a imagem parcial esquerda e direita de apenas alguns décimos de milímetro tem o efeito da chamada "paralaxe de altura" e torna a fusão espacial mais difícil. Portanto, ao montar as imagens estéreo, deve-se tomar cuidado especial para evitar desvios de altura nas imagens parciais em todas as circunstâncias.
- As diferenças de posição ou visualização (paralaxes), que só ocorrem paralelamente à linha de conexão da base de gravação, também devem ser paralelas à conexão do centro da lente quando visualizada. Em outras palavras: As imagens parciais devem ser dispostas em relação umas às outras de modo que seus limites laterais fiquem alinhados paralelamente entre si e não sejam inclinados em seu plano entre si. Caso contrário, ocorrerão paralaxes de altura desagradáveis, que têm um efeito perturbador no efeito estereoscópico.


- As imagens devem ser nítidas em toda a área de gravação da imagem porque o olho humano vê todos os objetos simultaneamente a uma distância de cerca de três metros e, por outro lado, foca imediatamente (acomoda) em distâncias mais próximas. O “borrão artístico” é, portanto, impróprio na imagem estéreo e deve ser evitado. Para obter um bom efeito espacial, devem ser usadas lentes de curta distância focal com alta profundidade de campo . Por outro lado, ao contrário da fotografia individual, não há necessidade de se preocupar com a “perspectiva correta”. As câmeras estéreo "reais" têm uma distância focal um pouco menor com uma grande profundidade de campo.
- O espaço (zona de profundidade) mostrado na imagem estereoscópica deve ser dimensionado para que possa ser capturado com nitidez de uma vez. A diferença no ângulo de visão entre o ponto mais próximo e o mais distante não deve exceder uma quantidade de 60 a 70 minutos de arco - "ângulo de Lüscher". Ao tirar fotos de paisagens, o ponto mais próximo deve estar a apenas três metros de distância. No caso de fotos macro, deve-se prestar atenção também à manutenção da zona de profundidade. O fundo fora da área permitida deve ser coberto ou desfocado.
- Ao visualizar as imagens estéreo, a convergência dos raios visuais não deve ultrapassar o valor máximo de convergência dos eixos do olho em aproximadamente 2 ° e, principalmente, não deve se tornar negativa, uma vez que a divergência pode impedir qualquer impressão espacial de ocorrendo.
Se as regras básicas listadas acima forem observadas, você sempre obterá um efeito espacial natural e puro. É por isso que não há necessidade de temer as linhas descendentes que são terrivelmente evitadas na fotografia comum , como as que ocorrem ao tirar fotos de edifícios com uma câmera inclinada.
Métodos de apresentação e visualização




Par de imagens estéreo
Um método simples é exibir duas imagens estereoscópicas parciais lado a lado; Com uma técnica de olhar especial (olhar paralelo - desde que a sua largura não exceda aproximadamente 65 mm em cada caso - ou olhar cruzado ) eles podem então ser percebidos como uma imagem espacial sem quaisquer outros auxílios.
Não são necessários pré-requisitos especiais para aprender a ver imagens estéreo sem ferramentas. Para tornar as coisas mais fáceis, no entanto, existem óculos prismáticos especiais. Com o método de observação KMQ , as imagens parciais não são mostradas lado a lado, mas sim uma em cima da outra.
Ao arquivar pares de imagens estereoscópicas em computadores, é comum salvar ambas as imagens parciais em um único arquivo JPEG e especificar o tipo de arquivo com ".jps". Esses pares de imagens são destinados à visualização com "vesgo" (estrabismo).
Método anáglifo
No caso das imagens anáglifas, as duas imagens parciais são impressas uma sobre a outra, sendo ambas as imagens parciais coloridas em cores complementares . "Anaglifo" é basicamente qualquer imagem estéreo em que as duas imagens parciais são mostradas simultaneamente na mesma superfície (a projeção de polarização também é, estritamente falando, uma "projeção anaglifo"), mas "anaglifo" geralmente significa uma representação anaglífica colorida : Zur Separando as duas imagens individuais, diferentes filtros de cores são usados nos óculos 3D , originalmente vermelhos na frente do olho direito e verdes na frente do esquerdo. Ao assistir ao filme, o filtro vermelho exclui a imagem do filme vermelho e a imagem verde torna-se preta - o filtro verde exclui a imagem da cor verde e o vermelho torna-se preto. Como os dois olhos agora veem imagens diferentes, uma imagem tridimensional é criada novamente no cérebro.
No final dos anos 1970, Stephen Gibson melhorou significativamente a tecnologia de anáglifos de cores com seu sistema patenteado "Deep Vision" que usa diferentes cores de filtro: vermelho na frente do olho direito e azul na frente do esquerdo. A empresa dinamarquesa “Color Code” agora também oferece seu próprio sistema anáglifo de cores. As cores do filtro dos óculos "ColorCode" são azuis na frente do olho direito e amarelas na frente do olho esquerdo. Outro método de anáglifo colorido (“Trio Scopics”) foi introduzido na Inglaterra em 2008 para o longa-metragem “Viagem ao Centro da Terra”, com o verde na frente do olho esquerdo e magenta na frente do direito.
Enquanto os óculos vermelho-verde e vermelho-azul usam apenas dois dos três canais de cores disponíveis do espaço de cores RGB , o ciano consiste em uma mistura de verde e azul, que, junto com o filtro vermelho, traz todas as três cores em jogo (em o caso de O mesmo se aplica aos vidros azul-amarelo, uma vez que o amarelo é criado a partir da luz vermelha e verde).
Processo de obturação
Um sistema de obturador 3D usa os chamados óculos obturadores (também conhecidos como óculos obturadores LCD) ao reproduzir imagens 3D. Esses óculos especiais têm lentes que consistem em duas superfícies de cristal líquido (uma para o olho esquerdo e outra para o direito) que podem ser alternadas eletronicamente entre transparentes e não transparentes. Isso pode ser usado para escurecer o olho esquerdo ou direito.
Sistema de polarização 3D
Um sistema de polarização 3D é um método para exibir imagens 3D estereoscópicas. Com este método, as imagens do par de imagens estéreo são emitidas cada uma em luz polarizada de forma oposta. Existem filtros de polarização compensados na frente das lentes de projeção e nos óculos 3D do visualizador.
Grade da lente
Se a imagem 3D, composta por várias imagens individuais, puder ser visualizada espacialmente em papel fotográfico normal, deve-se buscar a ajuda de um laboratório especial. As imagens individuais são expostas em faixas estreitas no portador de imagens e um filme lenticular é aplicado sobre a imagem geral , o que permite a visualização de diferentes ângulos. Quanto mais imagens estiverem disponíveis para este filme de grade, menos o ângulo de visão salta ao mover a imagem. Para este procedimento, entre outros. uma câmera 3D especial desenvolvida pela empresa Nimslo que pode até tirar quatro fotos simultaneamente em um filme de 35 mm . Desde a década de 1970, há uma série de cartões-postais (e ocasionalmente também fotos de grande formato) que usam esse método.
Visualizador de slides

Para visualizar dois slides que juntos formam uma foto 3D, bastam dois "peeps" simples de slides para uma única pessoa, nos quais as imagens esquerda e direita podem ser visualizadas sem nenhum esforço técnico adicional.
Imagens de espaço de pontos aleatórios
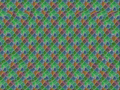
Durante sua pesquisa em 1959, Bela Julesz descobriu que a percepção da profundidade espacial ocorre apenas no cérebro. Para tanto, ele experimentou um tipo especial de pares de imagens estéreo que continham apenas pontos distribuídos aleatoriamente ( ponto aleatório inglês ). O efeito espacial é criado apenas pela disparidade lateral . Um círculo pode ser visto na imagem a seguir.
O princípio das imagens espaciais de pontos aleatórios é a geração de imagens de pontos aleatórios. As diferenças espaciais são geradas como uma diferença na segunda imagem. A diferença na altura resulta da diferença entre um ponto na primeira imagem e sua posição alterada na segunda imagem. Isso funciona tão bem porque o cérebro tenta fazer as duas imagens coincidirem. Ainda não está totalmente claro como o cérebro reconhece dois pontos na retina esquerda e direita como "pertencentes um ao outro", o chamado " problema de correspondência ".

SIRDS
O próximo desenvolvimento seguiu com o Estereograma de Pontos Aleatórios de Imagem Única (SIRDS), que é uma única imagem grande. Este tipo de estereograma foi desenvolvido por Christoper Tyler e Maureen Clarke por volta de 1979.

O procedimento para criar SIRDS é semelhante ao para criar o par de imagens de pontos aleatórios. A diferença é que uma imagem de ponto aleatório inteira não é gerada, mas uma faixa primeiro. A partir dessa faixa é calculada uma faixa de diferença, que é fixada diretamente na faixa original; uma outra faixa de diferença é calculada além da faixa de diferença e assim por diante, até que toda a imagem esteja completa. É vantajoso colocar a tira original no meio e colocar as tiras de diferença à esquerda e à direita dela. Isso pode ser particularmente compreendido com o SIS mostrado abaixo.
Para obter a impressão espacial correta, o olhar do observador deve ser direcionado para a imagem no infinito. Estrabismo dá uma impressão 3D invertida: os elementos da imagem que estão realmente em primeiro plano aparecem no fundo e vice-versa. Após um período de adaptação, os contornos incorporados tornam-se visíveis.
A pedido, o jogo de computador Magic Carpet usou o método SIRDS para representar espacialmente o jogo em tempo real. Devido à interatividade do jogo, essa representação é um caso especial do estereograma animado.
SIS
Em meados da década de 1980, os padrões aleatórios começaram a ser substituídos por imagens reais. O estereograma de imagem única (SIS) então experimentou um grande boom na década de 1990, após Tom Baccei a série de livros The Magic Eye (o olho mágico inglês foi revelado).
Irmã com coração

Estereograma animado


Medição de movimento estereoscópico


A estereoscopia clássica registra as coordenadas espaciais (posição 3D) de pontos correspondentes em um par de imagens. Muitos aplicativos requerem a combinação de nuvens de pontos 3D para formar objetos individuais. Muitas vezes, essa tarefa não pode ser resolvida apenas com base nas informações 3D. Por exemplo, a criança que anda na rua na imagem superior esquerda só pode ser separada do carro à sua frente por seu movimento. Para este propósito, 6D-Vision rastreia pontos com uma distância conhecida ao longo de dois ou mais pares sucessivos de imagens e mescla esses dados. Isso resulta em uma posição 3D melhorada e ao mesmo tempo é capaz de medir a direção e a velocidade do movimento para cada pixel em consideração. Esta informação (posição 3D + movimento 3D) permite que a posição de objetos relevantes seja prevista e potenciais riscos de colisão sejam identificados. O resultado é mostrado na imagem superior direita. As setas mostram a posição esperada em 0,5 segundos.
O método também é utilizado no reconhecimento de gestos, ou seja, o movimento de membros, sem a necessidade de modelar a forma da pessoa, utilizando apenas uma câmera estéreo passiva.
Procedimentos adicionais
Método Pulfrich
Os chamados "óculos Pulfrich" com filtros claro / escuro (por exemplo, "Nuoptix"), use o "efeito Pulfrich" para uma impressão 3D ao rastrear tiros de lado. B. pelo programa de televisão RTL Tutti Frutti no início de 1990 muito popular. O método Pullfrich não é um display estereoscópico real, já que a imagem só é gravada com uma única câmera. As duas perspectivas para o olho esquerdo e direito surgem através das lentes escurecidas dos óculos, que se baseiam no princípio de Pulfrich. A visão escurecida é passada para o cérebro com um atraso de tempo, de modo que duas visões de perspectivas diferentes (mas deslocadas no tempo) formam a impressão da sala. Esse processo só pode ser usado de forma muito limitada, porque requisitos importantes devem ser atendidos para que esse processo funcione como um processo 3D. A câmera ou os objetos devem sempre (fundamental e continuamente) realizar um movimento constante, lento, exclusivamente horizontal. Se apenas uma dessas condições for quebrada, nenhum efeito 3D ocorrerá.
Método ChromaDepth

O processo ChromaDepth da American Paper Optics é baseado no fato de que as cores são refratadas em diferentes graus em um prisma . Os vidros ChromaDepth contêm películas de visualização especiais, que consistem em prismas microscópicos. Como resultado, os raios de luz são desviados em diferentes graus dependendo da cor. Os raios de luz atingem os olhos em diferentes lugares. No entanto, como o cérebro assume raios de luz retos, surge a impressão de que as diferentes cores vêm de diferentes pontos de vista. O cérebro, portanto, cria a impressão espacial (efeito 3D) a partir dessa diferença. A principal vantagem desta tecnologia é que você pode visualizar imagens ChromaDepth sem óculos (ou seja, bidimensional) sem problemas - não há imagens duplas irritantes. Além disso, as imagens ChromaDepth podem ser giradas conforme necessário sem perder o efeito 3D. No entanto, as cores só podem ser selecionadas até certo ponto, pois contêm as informações de profundidade da imagem. Se você mudar a cor de um objeto, sua distância percebida também mudará. Isso significa que um objeto vermelho sempre vem antes de z. B. objetos verdes ou azuis.
Óculos prisma

{kind=link}
Vários métodos também usam o efeito de que os prismas desviam o caminho do feixe. Por exemplo, B. o dispositivo de visualização estéreo SSG1b, também conhecido pelo nome de KMQ desde os anos 1980, esse efeito. Principalmente para livros e pôsteres onde a precisão das cores e a simplicidade são importantes. Mas pode ser usado mais cedo na tela ou para projeção com alguns espectadores. No entanto, o usuário deve manter a distância adequada para a imagem e manter a cabeça permanentemente horizontal. Caso contrário, as linhas de visão de ambos os olhos não coincidirão com as duas imagens parciais que estão dispostas uma abaixo da outra. Daí o nome em inglês do processo: Over-Under . Essas restrições serão removidas no futuro por um hardware aberto ou projeto de código aberto chamado openKMQ para trabalhar em computadores.
Áreas de aplicação

Além de entretenimento, a estereoscopia também é usada para ilustrar estereometria e trigonometria , em livros de matemática , e para estudar as leis da visão binocular.
Dove demonstrou a criação do brilho com a ajuda do estereoscópio. Se a superfície de um desenho for pintada de azul e a correspondente ao outro desenho for pintada de amarelo, você pode vê-la com um brilho metálico quando olha para ela no estereoscópio através de um vidro roxo. Branco e preto tornam a imagem ainda mais vívida. Dove também usou o estereoscópio para distinguir títulos reais de falsos. Se você olhar os papéis a serem comparados com o instrumento, as menores diferenças são imediatamente perceptíveis. Os caracteres individuais que não correspondem exatamente ao original não coincidem e parecem estar em planos diferentes.
O desvio horizontal dos pontos correspondentes da imagem nas imagens parciais estereoscópicas emparelhadas também pode ser avaliado tecnicamente para determinar a profundidade. Aqui, as exigências fisiológicas excessivas não desempenham um papel e usa-se o efeito na astronomia , em que nenhuma montagem emparelhada das imagens é necessária. Se, por outro lado, você deseja uma visualização confortável e natural, talvez mesmo sem grandes ajudas técnicas, a montagem emparelhada das imagens estereoscópicas parciais para formar fotos 3D é prática e comum.
Na tecnologia de veículos e robôs, sensores de vídeo estéreo são usados para medir distâncias e distâncias.
A avaliação da foto aérea estereoscópica pode ser usada para mapear formações de terreno e criar modelos 3D de cidades. Também foi usado na aerotriangulação e fotogrametria até a década de 1990 .
Em publicações especializadas em biologia estrutural , cristalografia de proteínas e espectroscopia de NMR , imagens estereoscópicas são usadas para representar estruturas moleculares tridimensionais. Esses pares de imagens estéreo podem ser visualizados com a visualização paralela sem ferramentas. Também existem lupas para este tipo de imagem. É fácil exibir estruturas moleculares estereoscopicamente: uma molécula é exibida, girada 6 ° no eixo vertical e exibida novamente. Essas duas imagens são exibidas lado a lado.
Hoje em dia, os jogos de computador funcionam principalmente com modelos tridimensionais que, com o suporte de software adequado, podem ser exibidos não apenas em um monitor convencional, mas também em monitores 3D estéreo especiais com efeito de profundidade. Com a ajuda de óculos obturadores 3D (sincronizados via cabo ou impulsos infravermelhos), as duas posições da câmera calculadas no software estéreo são colocadas alternadamente e lateralmente disponíveis aos olhos do observador, de modo que uma impressão espacial da cena seja criada no centro visual do cérebro. Filmes de animação 3D estéreo para cinemas 3D digitais são produzidos de acordo com o mesmo padrão, mas com uma resolução muito maior.
No caso de cenas reais de filmes em 3D ou gravações de televisão em 3D, duas câmeras de vídeo de alta resolução são hoje montadas lado a lado à distância dos olhos (muitas vezes apenas viável usando um "equipamento de espelho") e um "estereógrafo" (especialista em estereoscopia) no Monitor de imagem 3D monitorado.
Evidência individual
- ↑ http://www.perseus.tufts.edu/cgi-bin/ptext?doc=Perseus%3Atext%3A1999.04.0057%3Aentry%3D%2396561
- ↑ http://www.perseus.tufts.edu/cgi-bin/ptext?doc=Perseus%3Atext%3A1999.04.0057%3Aentry%3D%2395112
- ↑ Duplamente confuso: Fuji Real 3D W1. em: heise.de , 22 de julho de 2009. (Exemplo: heiseFoto apresenta uma nova câmera 3D)
- ↑ Hermann Lüscher: A escolha da base mais econômica para fotos estéreo de longa distância e close-up. In: O estereoscopista. No. 7, 1930.
- ↑ Werner Pietsch: A prática de close-ups estéreo. Knapp, Halle (Saale) 1957, DNB 453777589 .
- ^ Werner Pietsch: fotografia estéreo. Fotokinoverlag, Halle (Saale) 1959, DNB 453777597 .
- ↑ Câmera 3D de Nimslo ( Memento de 7 de março de 2006 no Internet Archive ) (link em inglês)
- ↑ springerlink.com: “6D-Vision: Fusion of Stereo and Motion for Robust Environment Perception”, Uwe Franke, Clemens Rabe, Hernán Badino, Stefan Gehrig, Daimler Chrysler AG, DAGM Symposium 2005
- ↑ 6D-Vision.com
- ↑ A. Suppes et al.: Sensores de vídeo baseados em estéreo usando uma análise de confiabilidade estocástica (PDF)
- ↑ Exemplos em: Duncan E. McRee: Practical Protein Crystallography. Academic Press, San Diego 1993, ISBN 0-12-486050-8 .
literatura
teoria
- David Brewster: O estereoscópio: é história, teoria e construção. Londres, 1856.
- O estereoscópio em “Die Gartenlaube” de 1855
- Christian Georg Theodor Ruete: O estereoscópio: uma representação popular. 2ª Edição. Teubner, Leipzig 1867.
- Fritz G. Waack : Fotografia estéreo. 4ª edição expandida. Publicação própria, Berlin 1985, também em tradução para o inglês devido à forte demanda dos EUA.
- Jean Pütz: The Hobbythek book 3. vgs Verlagsgesellschaft , Cologne 1979, ISBN 3-8025-6102-3 .
- Fritz Waack, Gerhard Kemner: Introdução à tecnologia e manuseio da fotografia 3-D. Museu de Transporte e Tecnologia, Berlim 1989.
- Alexander Klein, Franz Weiland, Rainer Bode: 3D - mas como! De imagens mágicas a fotografia 3D. Bode Verlag, Haltern 1994, ISBN 3-925094-64-4 .
- Thomas Abé: Curso básico de imagens 3D. VfV-Verlag, Gilching 1997, ISBN 3-88955-099-1 .
- Holger Tauer: 3D estéreo. Schiele & Schön, Berlin 2010, ISBN 978-3-7949-0791-5 .
- Leo H. Bräutigam: Fotografia estéreo com uma câmera 35mm: Uma introdução orientada à prática para fotografia 3D analógica e digital. Wittig Fachbuchverlag, Hückelhoven 2004, 2º suplemento “Digital Stereo 3D Photography” 2014, incluindo visualizador e slide de dados, ISBN 978-3-930359-31-8 .
- Leo H. Bräutigam: e-book, fotografia 3D - vídeo 3D , Civitas Imperii Verlag Esslingen, 2014, ISBN 978-3-939300-28-1
Livros ilustrados
- Achim Bahr: estereoscopia. Salas, imagens, imagens espaciais. Thales Verlag, 1991, ISBN 3-88908-549-0 .
- Tom Baccei, Cheri Smith: The Magic Eye. Ars Edition, ISBN 3-7607-2264-4 .
- Marc Grossman: The Magic Eye, Volume I por NE Thing Enterprises. Andrews & Mcmeel, ISBN 0-8362-7006-1 .
- Arthur G. Haisch: Hotel Morbid / Morbid Rooms, imagens de salas estéreo. 3-D-World Verlag, Basel 1983, ISBN 3-905450-02-X .
- Matthias Henrici, Christian Neubauer: momentos fantásticos I. Lingen Verlag
- Hartmut Wettmann: A Renânia em fotos estéreo históricas. Dr. Gebhardt + Hilden, 1999, ISBN 3-932515-15-3 .
- Ulli Siebenborn: Interactive Pictures, Volume I. Taschen Verlag, 1994, ISBN 3-8228-9211-4 .
- Roland Bartl, Klaus Bartl, Andreas Ernstberger, Peter Schwartzkopff: Pep Art. 3-D pictures of the new kind. Südwest Verlag, Munich 1994, ISBN 3-517-01632-2 .
- Katja Lembke , Arnulf Siebeneicker (eds.); Hannes Wirth: Hildesheim em 3-D. Roemer and Pelizaeus Museum, Hildesheim 2009, ISBN 978-3-938385-29-6 .
- Yuki Inoue, Masahira Oga (Ed.): Estereograma. ISBN 3-7607-1106-5 .
- Andrew A. Kinsman: Random Dot Stereograms. ISBN 0-9630142-1-8 .
Sem categoria
- Steinhauser: Sobre a construção geométrica das imagens estereoscópicas. Graz 1870.
- Rolf Sander, Martin Simeth: O pequeno hobbit e o autoestereograma In: Spectrum of Science . No. 1, 1995, pp. 10-15.
- Imre Pál: Térláttalós ábrázoló mértan. Budapeste, 1959.
- Alemão: geometria descritiva em imagens espaciais. do húngaro por N. Miklós Marosszéki. Editora alemã de ciências, Berlin 1961, DNB 575340851 .
Links da web
- A Renânia em fotos estéreo históricas
- Mundo da estereoscopia
- Explicações sobre a tecnologia 3D estereoscópica.
- Galerias de fotos 3D, download de fotos 3D, blog de notícias, informações
- Câmeras estéreo históricas e acessórios no fórum Aperture and Time